

















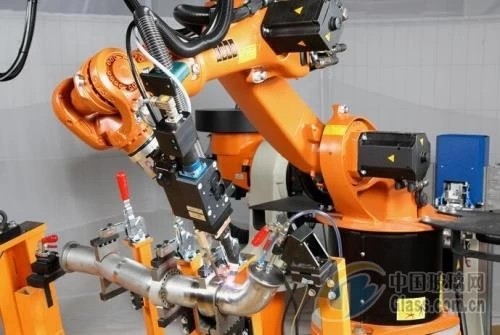
産業用ロボットのガラス加工装置への応用
Fanyu
Chinamirrormanufacturer.com
2017-11-17 15:19:21
産業生産に科学技術の発展によってもたらされた大きな利便性を懸念し、科学技術の採用は、工業生産の実際の製品の品質と生産効率のニーズを満たすために、しかし、また、優れた保護をもたらすために、工業生産の労働者の安全性に意味します。 本稿では、産業用ロボットの応用におけるガラス加工装置の実際の作業において、綿密な調査と分析を行い、将来のワークプロセスにおいて、品質管理の特定の作業を達成することを希望する。
産業用ロボットのガラス加工装置への応用
まず、は、特定のロボットのアプリケーションの状況では、解析を行うには、ロボット制御プログラムのシステムを確立する必要がありますを目指す必要があります具体的な作業プロセスでは、ロボットの機能は、コンクリートの調整とデバッグを運ぶ、ガラス加工工業生産プロセスのロボットを保証する良い生産効果 ガラス製品の品質をアップグレードし、産業生産効率のアップグレード需要の生産に市場経済を満たすために。
第二に、我々は、ガラスのストレートエッジマシンの作業工程では、産業用ロボットのアプリケーションに注意を払う必要があります、実際の生産作業の実践を通じて、ロボットアプリケーションの科学的かつ効果的な方法について説明します。 本稿では, ロボットによるガラス製品の取り扱いにおいてロボットの安全性を分析し, 将来の作業においてアプリケーションの需要を実現するための検査システムを構築する. その後、ガラス加工の生産プラットフォーム上で、ガラスを運ぶロボットを走らせ、人工標的ではなくロボットをさらに実現させようとする。
実用的な作業を通じて、産業用ロボットは、元の場所からガラスを除去するための方法を取ることができることを発見することができます, と場所の指定された範囲に安全, ロボット支援産業生産の目的を達成するために, 生産効率を向上させる, 労働力
さらに、ガラス加工・生産工程においても、ロボットがより詳細な作業環境に参加するためには、ロボットがガラスのストレートエッジマシンの自動給餌に加わることができるようにする必要があります。 この作業に携わるロボットの品質と安全性をテストするためには、実験プラットフォームを確立する必要があります。
実験プラットフォームの具体的な作業工程では、パラメータの設定は、特定の描画作業パスの設定は、設定ポイントの指導結果を持っていることを見つけることができます, 実験の経験と教訓をまとめる, 将来の仕事で調整する科学的な方法を適用する, より良い将来の仕事の円滑な進捗を保証することができます, また、工業生産の実際の品質と効果をさらに高めることができます。
この練習では、ガラス製造工程における高度なロボット作業モードの適用が、実際の作業効率と生産品質を向上させることができることを証明しており、一方で、人手労働の強度を低減し、人員作業の危険を軽減し、安全生産の意識を促進することができる 同時に労働者の保護は、工業生産の経済的利益の全体的な価値につながった。
産業用ロボットのガラス加工装置への応用
まず、は、特定のロボットのアプリケーションの状況では、解析を行うには、ロボット制御プログラムのシステムを確立する必要がありますを目指す必要があります具体的な作業プロセスでは、ロボットの機能は、コンクリートの調整とデバッグを運ぶ、ガラス加工工業生産プロセスのロボットを保証する良い生産効果 ガラス製品の品質をアップグレードし、産業生産効率のアップグレード需要の生産に市場経済を満たすために。
第二に、我々は、ガラスのストレートエッジマシンの作業工程では、産業用ロボットのアプリケーションに注意を払う必要があります、実際の生産作業の実践を通じて、ロボットアプリケーションの科学的かつ効果的な方法について説明します。 本稿では, ロボットによるガラス製品の取り扱いにおいてロボットの安全性を分析し, 将来の作業においてアプリケーションの需要を実現するための検査システムを構築する. その後、ガラス加工の生産プラットフォーム上で、ガラスを運ぶロボットを走らせ、人工標的ではなくロボットをさらに実現させようとする。
実用的な作業を通じて、産業用ロボットは、元の場所からガラスを除去するための方法を取ることができることを発見することができます, と場所の指定された範囲に安全, ロボット支援産業生産の目的を達成するために, 生産効率を向上させる, 労働力
さらに、ガラス加工・生産工程においても、ロボットがより詳細な作業環境に参加するためには、ロボットがガラスのストレートエッジマシンの自動給餌に加わることができるようにする必要があります。 この作業に携わるロボットの品質と安全性をテストするためには、実験プラットフォームを確立する必要があります。
実験プラットフォームの具体的な作業工程では、パラメータの設定は、特定の描画作業パスの設定は、設定ポイントの指導結果を持っていることを見つけることができます, 実験の経験と教訓をまとめる, 将来の仕事で調整する科学的な方法を適用する, より良い将来の仕事の円滑な進捗を保証することができます, また、工業生産の実際の品質と効果をさらに高めることができます。
この練習では、ガラス製造工程における高度なロボット作業モードの適用が、実際の作業効率と生産品質を向上させることができることを証明しており、一方で、人手労働の強度を低減し、人員作業の危険を軽減し、安全生産の意識を促進することができる 同時に労働者の保護は、工業生産の経済的利益の全体的な価値につながった。